GPS Devices are not Created Equal

Our mission is to help businesses connect, protect, and derive more value from their assets. As a leading global innovator, developer, and supplier of IoT solutions, we drive continuous innovation to enable our partners to deploy confidently at scale worldwide.

Here is an Attempt to Explain Why and What to Watch out for…
I am using the term GPS loosely here as the correct term these days is Global Navigation Satellite System (GNSS) – as the modern chips use multiple systems like GLONASS (Russian), Galileo (EU) or Beidou (China), in addition to the US GPS system.
Most systems will work (as in get a position fix) given a clear view of the sky and enough time. But these are ideal conditions, and the real world doesn’t operate that way. Invariably your device is installed on the underside of a trailer, or tucked away under the dashboard of your vehicle, or even inside a container – and we want it to work!
This point is particularly important when it comes to our battery-powered tracking devices. A good and smart design can halve the time (and therefore power used) when getting a GPS fix.
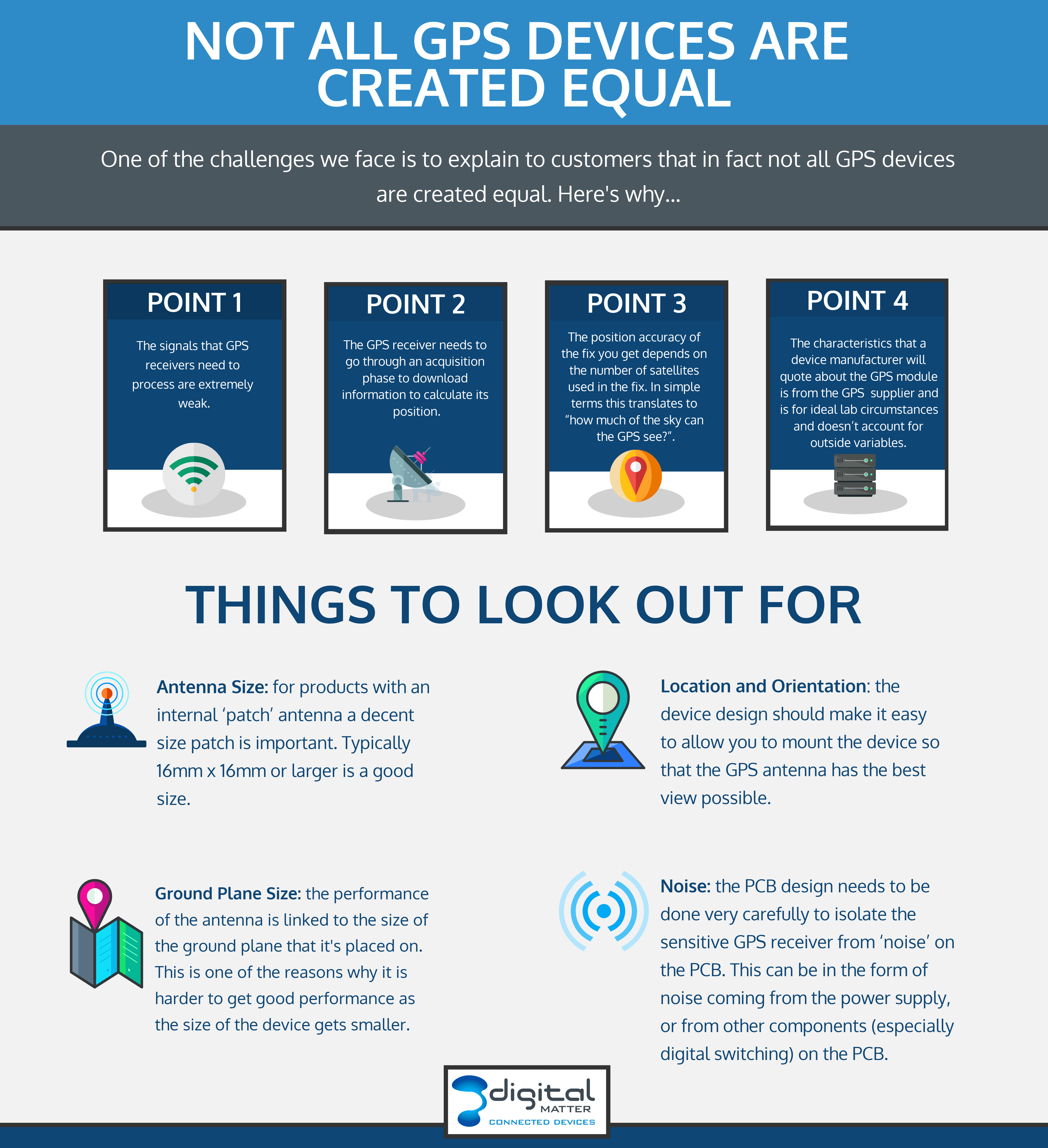
- The signals that GPS receivers need to process are extremely weak.
- The GPS receiver needs to go through an acquisition phase where it downloads information about the satellites and their positions before it can use the information contained in the signals to calculate its position. The required signal strength required to download this information (acquisition) is much greater than the signal required for tracking.
- The position accuracy of the fix you get depends on the number of satellites used in the fix and their “dilution of precision” or DOP. If the satellites used to get the fix are close together in the sky then the accuracy of the fix will be less than if the satellites are spread out. In simple terms, this translates to “how much of the sky can the GPS see?”.
- The characteristics that a device manufacturer will quote about the GPS module in their product comes from the GPS module supplier and is for ideal lab circumstances for the module, and doesn’t account for how it has been designed into the device. The best module in the world will not work properly with a poor antenna or a noisy power supply.
Things to Look For:
Here are design considerations to take into account when evaluating a product (or designing one):
 Antenna Size – For products with an internal ‘patch’ antenna a decent size patch is important. Typically 16mm x 16mm or larger is be a good size.
Antenna Size – For products with an internal ‘patch’ antenna a decent size patch is important. Typically 16mm x 16mm or larger is be a good size.
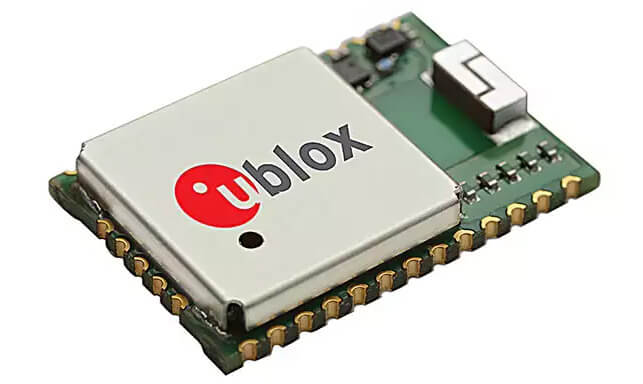
The CAM-M8 from ublox is a great little module, but take a look at that tiny ceramic chip antenna on there. We used this module in an IoT device that needs a position to update every couple of days and is outdoors in a field. In our testing, it battled to get a fix when indoors (even next to a window), compared to our vehicle tracking devices with a full patch antenna.
Ground Plane Size – The performance of the antenna is generally linked to the size of the ground plane that is placed on. This is one of the reasons why it is harder to get good performance as the size of the device gets smaller.
For example, this is the GPS patch antenna on our Remora device. Nice big patch with a large ground plane around it. No noisy components nearby. [BTW – the yellow tape on the antenna is to prevent people from shocking the GPS module with ESD (static) when they handle the unit when provisioning].
 LNA (Amplifier) – A good design will invariably contain an LNA (low noise amplifier) which as the name suggests can take the signal coming from the GPS patch antenna and boost it.
LNA (Amplifier) – A good design will invariably contain an LNA (low noise amplifier) which as the name suggests can take the signal coming from the GPS patch antenna and boost it.
Location and Orientation – The device design should make it easy to allow you to mount the device so that the GPS antenna has the best view possible of the sky, of course depending on the application. We have customers who install our tracking devices in dashboards as concealed devices (and they work!).
Noise – The PCB design needs to be done very carefully to isolate the sensitive GPS receiver from ‘noise’ on the PCB. This can be in the form of noise coming from the power supply, or from other components (especially digital switching) on the PCB. Try listening to someone whispering on the other side of the room while the TV is turned on at full volume!
Firmware Smarts
In addition to the physical hardware it is critical that a device is *smart* in terms of how the firmware manages the GPS:
Assisted GPS – All modern GPS systems allow the host device to ‘prime’ the GPS engine with information to help it get a fix faster and more accurately. Where possible on our designs we use an offline data file that we download periodically to the device and use that to provide the GPS with Almanac and Ephemeris data.
Smart Backup – The firmware needs to be intelligent in managing when to power the GPS down, and when to keep it in a low power standby mode.
Test
On one of our recent designs, we were testing out different combinations of SAW filter and LNA on the GPS signal. (GPS modules often need a SAW filter to block high power cellular signals if they are placed close to a cellular antenna on a design.) The difference between fairly simple changes on the RF components made a massive difference to the overall performance of the product, like DOUBLE the time to get a GPS fix. This is especially noticeable when the device is in poor signal conditions, like in a forest, urban canyon, or even indoors.
So when evaluating a tracking or location device with a GPS in it, please don’t assume that they are all equal in their performance just because the manufacturer recites the GPS module performance characteristics. The best and simplest way to assess this is to do field tests and put the device through its paces in testing conditions.
Related News




Let’s Get Started
Submit the form to get in touch with a Digital Matter representative from your region.
Contact UsSubscribe
Get helpful content delivered straight to your inbox.

Let’s Get Started
Submit the form below to get in touch with a Digital Matter representative from your region.

Looking for support? Check out our knowledge base.

Information on becoming a Digital Matter Partner.

Information on pricing, availability, and proof of concept.

Guidance on selecting the right products for your application.